
Our research on ground robotics focuses on mobility and assessing 3D traversability of rough outdoor terrain and on heterogeneous team operations:

Optimal design and system integration of Unmanned Ground Vehicles for tough applications
The unstructured outside world imposes many constraints on unmanned ground systems that want to navigate through this environment. RMA focuses specifically on the system integration task to develop novel ground robot systems that are capable to cope with the requirements.
RMA focuses on applications where the robotic systems are stressed under tough conditions. Examples are humanitarian demining, search and rescue and persistent outdoor environmental surveillance.
Fast 3D mapping tools, combining data from aerial and ground-based assets
As more and more robotic tools get deployed, the key issue becomes how to obtain a common understanding of the environment by using heterogeneous robots.
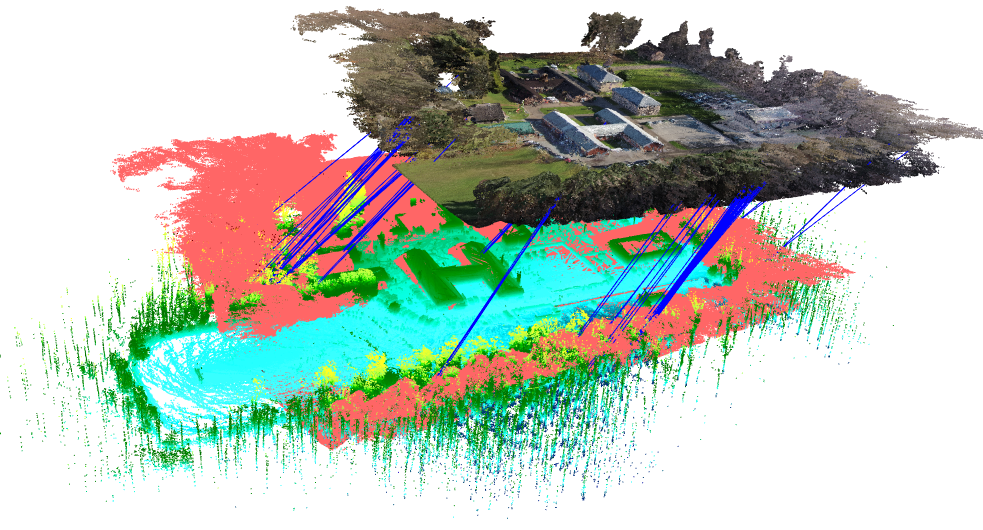
Therefore, RMA studies the combination of multiple heterogeneous 3D datasets acquired by different multi-robot sensor systems operating in various large unstructured outdoor environments. This problem is very complex, especially when the system deals with a-priori unknown large-scale outdoor environments, facing problems of displacement, orientation and scale difference between the 3D data sets.
In order to overcome the limitations of dealing with 3D data sets coming from different sensor systems (lasers, cameras) and different perspectives of the environment (ground and air), we develop a semi-automated and robust 3D registration process, that allows us to consistently align two or more heterogeneous point clouds.

Multi-Agent Collaborative Mapping
When multiple robotic agents are active in the same environment, they need to build up a common understanding or representation of this environment. This is commonly referred to as collaborative mapping. RMA works on the development of heterogeneous robotic ground systems for the collaborative mapping using multiple sensing modalities (LIDAR, 3D vision, …).
RMA works on collaborative mapping robots for application domains such as perimeter and area surveilance and also for supporting CBRN operations.

Heterogeneous collaboration between multiple autonomous and semi-autonomous unmanned agents
RMA works on the interoperability between heterogeneous robotic systems. Interoperability is a concept that spans multiple domains: from networking, protocols and messaging over software architectures to shared situational awareness to multi-agent coordination strategies. RMA is active in all these domains with research partners from across the EU (e.g. in the ICARUS project) and NATO countries (e.g. in the context of the NATO-IST-149 RTG) working group, in order to ensure interoperability between ground robotic systems of different nations.
The research of RMA focuses on ensuring the interoperability between the very different (heterogeneous) ground robotics tools and focuses on the following reseach questions:
- What are the most optimal strategies for collaboration?
- How can multi-agent systems share their data most efficiently?
- How can unmanned ground systems and humans on the field collaborate most effectively?
Terrain traversability analysis and mobility on rough terrain
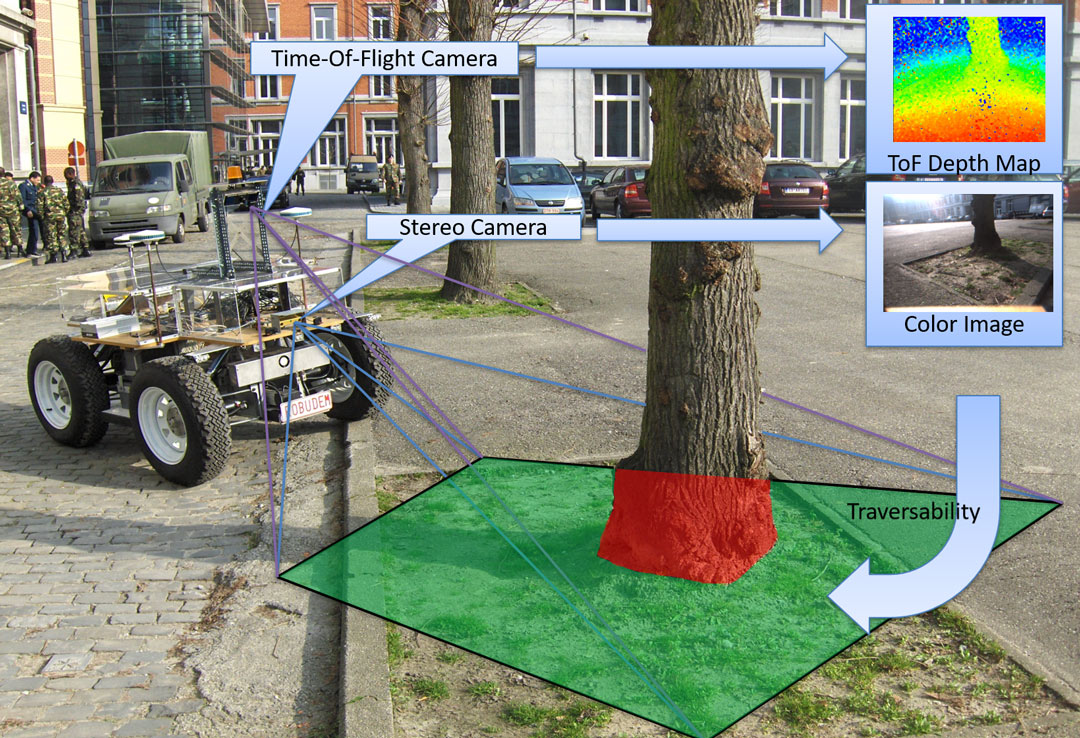
When navigating on rough outdoor terrain, one of the key concerns for an autonomous robot is to assess whether the terrain is traversable or not. This is a difficult research question, as the traversability depends on multiple factors, like the soil conditions, vegetation, robot mobility characteristics, robot dynamics, weather conditions, etc.
In order to make (semi-)autonomous ground robots capable of working also in difficult outdoor conditions, RMA works on the development of algorithms for the automatic assessment of the terrain traversability, mostly using camera systems (monocular, binocular, trinocular and time-of-flight cameras). The two major challenges are the identification of a model to link the traversability parameters to a correct traversability state and the assessment and processing of all these parameters in real-time.

3D Reconstruction as an aid for robot navigation
Intelligent robotic systems that want to perform complex tasks in an unstructured environment need to understand the 3D nature of their surroundings and their own position within this space. This is a problem typically solved with a varied mix of sensing technologies, including active sensing systems (such as LIDAR, ultrasound or infrared rangers, etc) for 3D reconstruction and GNSS – sensors for localisation. However, in a military context, active sensors provide the disadvantage of detectability, whereas GNSS solutions can be easily jammed.
Therefore, RMA works on the development of 3D reconstruction and localisation algorithms that are mostly based on passive sensors (e.g. monocular, binocular and trinocular cameras) and that can work in GNSS-deprived environments.