
The video on the right gives a brief overview of all the aerial robotics research topics that are currently tackled by our research group.
Below, you can find a more detailed description of our research on aerial robotics, which ranges from the study of basic control problems to advanced sensor processing and human factors.
Other research groups are also performing research into the more general topic of aviation. An overview of all the aviation research for the whole of RMA can be found here.

Human factors & human performance modelling for reducing the number of UAS incidents
As more and more Unmanned Aircraft Systems (UAS) come into operations, the risk of incidents also increases. Therefore, RMA performs research to support the UAS operators by developing a strategy to incorporate human factors in the evaluation of UAS and UAS operators. A qualitative and quantitative benchmarking tool based on standardized test methodologies is under development, integrated into a realistic simulation environment. This will enable:
- on-the-job pilot training in a safe simulation environment with qualitative and quantitative assessment of the pilot skills, which will support the training of UAS pilots
- a simulation tool for the quick risk assessment for the certification of novel UAS systems, providing support to Airworthiness Agencies
- a simulation tool for commanders in the field to practice for certain risky operations before deploying the real UAS, thereby minimizing risks and operational losses
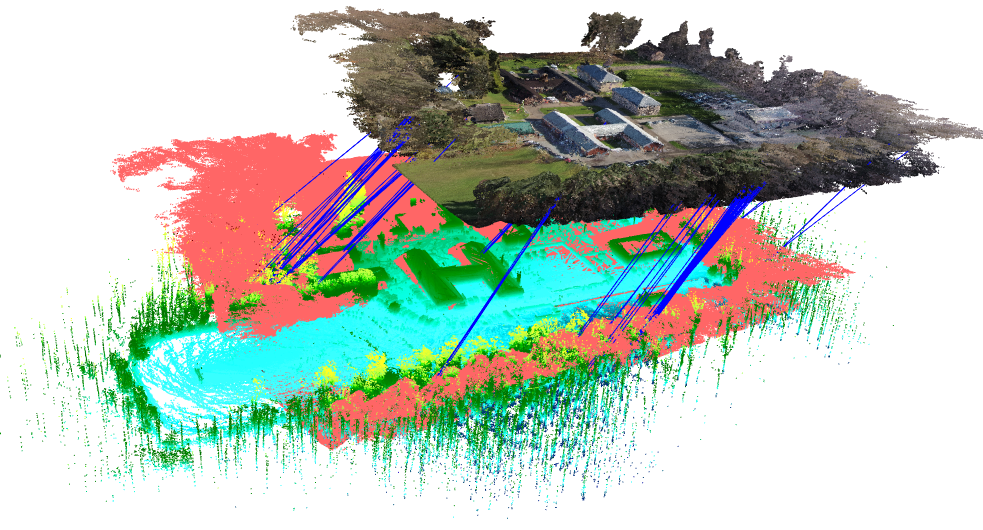
Fast 3D mapping tools, combining data from aerial and ground-based assets
As more and more robotic tools get deployed, the key issue becomes how to obtain a common understanding of the environment by using heterogeneous robots.
Therefore, RMA studies the combination of multiple heterogeneous 3D datasets acquired by different multi-robot sensor systems operating in various large unstructured outdoor environments. This problem is very complex, especially when the system deals with a-priori unknown large-scale outdoor environments, facing problems of displacement, orientation and scale difference between the 3D data sets.
In order to overcome the limitations of dealing with 3D data sets coming from different sensor systems (lasers, cameras) and different perspectives of the environment (ground and air), we develop a semi-automated and robust 3D registration process, that allows us to consistently align two or more heterogeneous point clouds.

Unmanned Aircraft Systems and data processing tools for supporting Mine Action
During humanitarian demining actions, operational deployment of small Unmanned Aircraft Systems (UAS), equipped with different sensors or multi-sensor-heads can enhance the detection process by allowing more precise scanning.
In the framework of the EU-FP7 project TIRAMISU, RMA equipped UAS with GPS, high-resolution RGB sensors and near-infrared (NiR) sensors. and developed data processing methods that allow spatial assessment of new hazardous risks caused by shifting of mines and unexploded ordnance.
The UAS tools developed by RMA were successfully deployed in Bosnia by the Bosnian Mine Action Centre and B-FAST during massive floods in spring 2014. After this mission, RMA trained local demining operators to work with the UAS and integrate these tools into their standard operating procedures. As a result of this successful transfer of technology from research to end users, a fleet of UAS is now in use by the local demining teams.

Unmanned Aircraft Systems tools for supporting heterogeneous search and rescue operations
Within the framework of the ICARUS project, a set of robotic tools were developed to increase the situational awareness of human crisis managers.
The research of RMA focuses on ensuring the interoperability between the very different (heterogeneous) aerial robotics tools and focuses on the following reseach questions:
- What are the most optimal strategies for collaboration?
- How can multi-agent systems share their data most efficiently?
- How can unmanned aircraft systems and humans on the field collaborate most effectively?
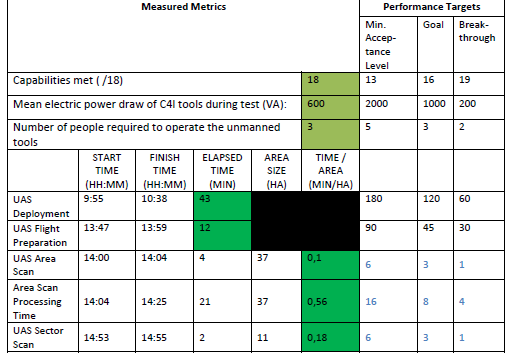
Requirements engineering in aviation & the operational validation of these requirements in “tough” environments
One of the problems in the development of Unmanned Aircraft Systems is the lack of adequate test and validation mechanisms to benchmark the performance of the end products. Indeed, it is very hard to quantify this performance in a rigorous scientific manner due to the fact that many variables are out of control in an outdoor environment, e.g. the weather conditions. Moreover, a scientific evaluation requires that multiple trials must be held to validate the statistical significance of the quantitative results. Existing validation methodologies can be generally categorized into two approaches: highly standardized test methodologies, and more open-ended competitions, each with their advantages and disadvantages.
At RMA, research is performed on seeking an optimal compromise between the traditional rigorous standardized approaches and the open-ended competitions.

Abnormal event detection using Unmanned Aircraft Systems
Modern Unmanned Aircraft Systems are able to send, in real time, aerial images captured by the visual sensors on board. However, the flow of information transmitted is huge, causing problems of analysis and storage, while the majority of the transmitted and processed data is inadequate or redundant.
Therefore, RMA works on the development of algorithms that make the UAS intelligent enough to distinguish between unimportant and important data. The main idea is to select then/before to send only pertinent information that does require human attention to the ground control station.
As a practical use case, we focus on border security and the detection of the traversal of humans as anomalous events.
Autonomous Unmanned Aircraft System control and navigation
While autonomy has been perceived for a long time as the Holy Grail in robotics, RMA is focusing its research in niche aspects of autonomous UAS control and navigation:
- Autonomous control for tough environments, e.g. automating the take-off and landing operation of UAS on vessels, like in the MarLand project.
- Human-robot close interaction, by AI tools supporting the human operator to achieve a high level of manned-unmanned teaming, like in the HADRON project.
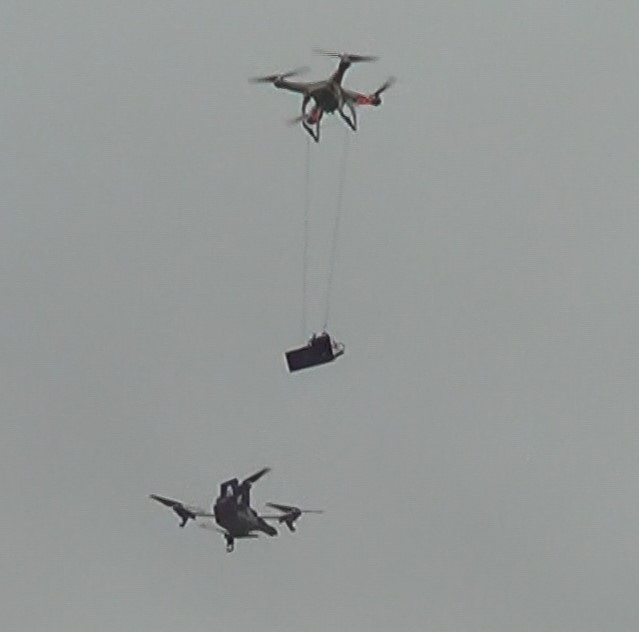
- Autonomous control: In-flight launch of Unmanned Aircraft Systems, where we study the control problem of launching a child-UAS from a mother-UAS.
- Autonomous indoor navigation: Autonomous staircase navigation, where we develop a semi-autonomous navigation system for a quadcopter, permitting the UAS to detect a staircase, model it in 3D and use this automatically reconstructed model to guide the UAS to the top of the staircase.