
- Loading Mastodon feed...
The use of unmanned aerial systems or drones, also within Belgian Defence, is exploding in recent years. This poses challenges related to the training of the personnel able to operate these tools. It is the vision that in the future, defence organisations will evolve to a situation where any soldier is a drone operator and the drone becomes just one of the many tools in the toolkit of the individual soldier. However, in order to arrive to such a situation, there are still multiple obstacles to be tackled. One major problem is that both the control and the data interpretation of current advanced military drones are much too complicated to be handled by personnel that has not received an extensive training, whilst it is impossible (or not feasible) to organize such a training for each and every soldier. A solution to this problem would be the augmented use of autonomous capabilities, both for the vehicle control and for the data interpretation aspect.
The global objective of this study is to render the use of drones easier for the operator. This is to be achieved through the development of artificial intelligence (AI) capabilities, assisting the human operator in controlling the drone and in processing the sensor data, thereby alleviating the need for extensive operator training.
Specific objectives of this study are to:
- Develop AI tools, allowing for safe and human-friendly control and navigation of drones. It is specifically *not* the goal to develop totally autonomous capabilities, but to develop assistive tools & algorithms that enable
– a novice pilot to operate a drone safely and effectively
– an expert pilot to operate multiple drones from a distance.
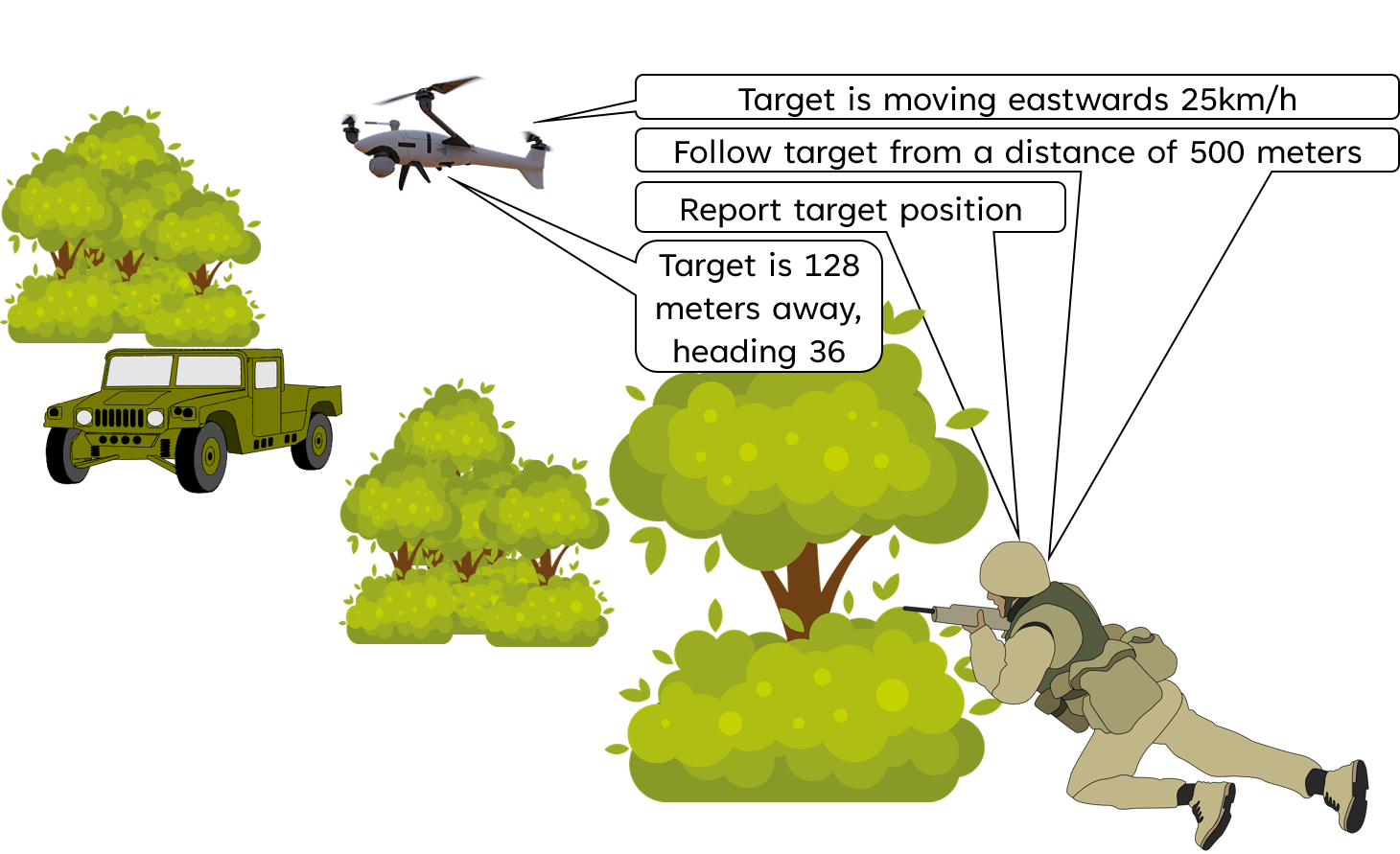
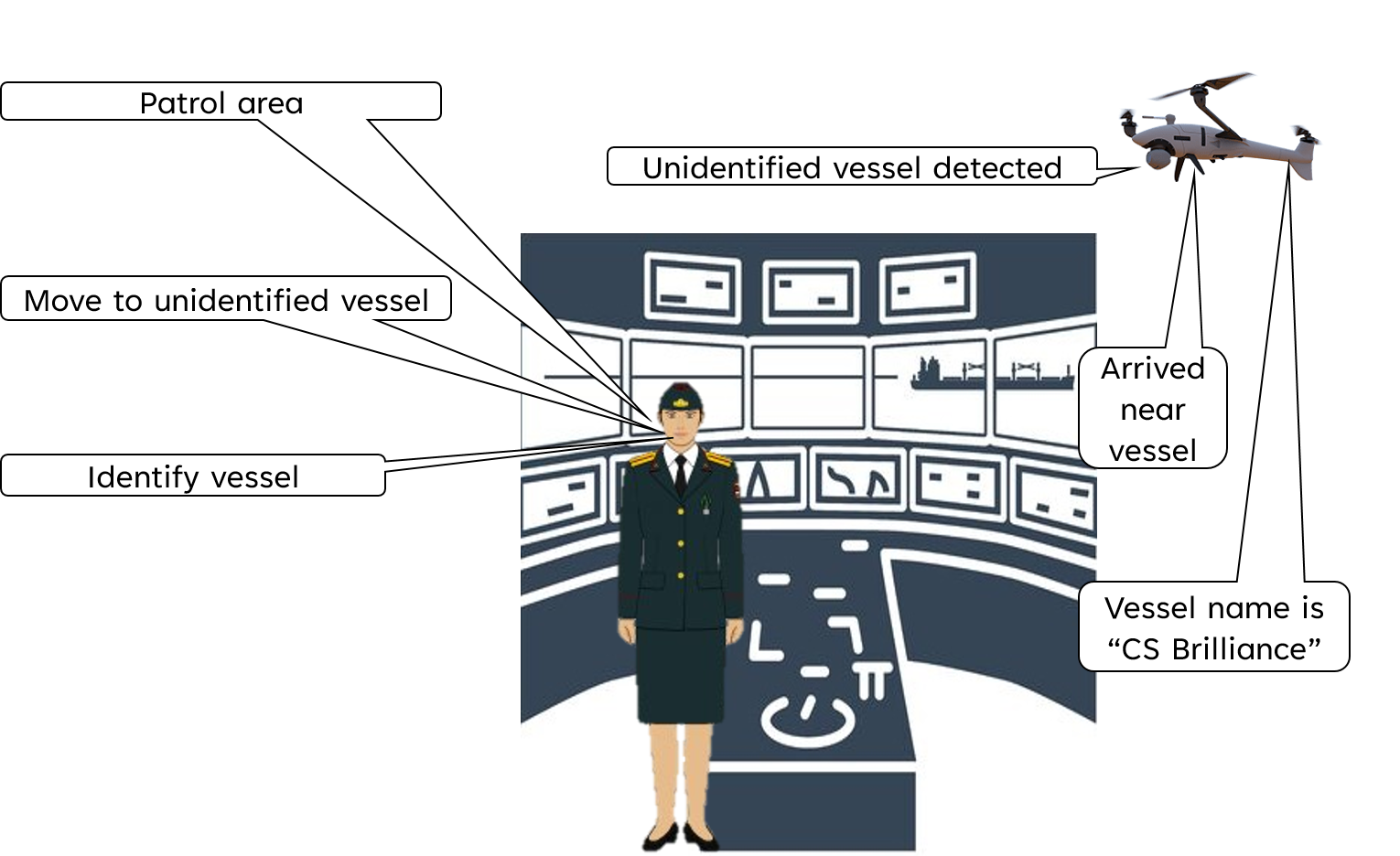
- Develop AI tools, assisting drone operators with semi-automated real-time data processing. The main goal here is to take the cognitive load on the human operator away from assessing large data streams towards assessing anomalies that have been detected automatically
Royal Higher Institute for Defence
with support from:
the LAND component
the Belgian Navy
2022 – 2026
0.6 M€
Project Publications
2025
- A. Casado Faulí, M. Coppieters, L. Carpi, T. -T. Nguyen, M. Vochten, R. Ronsse, G. De Cubber, B. Lauwens, and B. C. Arrue, “Multi-UAV geometrical area coverage using gradient descent," in Proc. SPIE Sensors + Imaging 2025, Autonomous Systems for Security and Defence II,, 2025.
[BibTeX] [Download PDF] [DOI]@inproceedings{spie_multi_2025, title={Multi-UAV geometrical area coverage using gradient descent}, author={Casado Faulí, A and Coppieters, M and Carpi, L and Nguyen, T.-T and Vochten, M and Ronsse, R and De Cubber, Geert and Lauwens, B and C. Arrue, B}, booktitle={Proc. SPIE Sensors + Imaging 2025, Autonomous Systems for Security and Defence II,}, editors ={}, publisher = {}, year = {2025}, vol = {13680}, location = {Madrid, Spain}, unit= {meca-ras}, doi = {https://doi.org/10.1117/12.3063062 }, url={https://www.spiedigitallibrary.org/conference-proceedings-of-spie/13680/136800B/Multi-UAV-geometrical-area-coverage-using-gradient-descent/10.1117/12.3063062.full}, project= {HADRON} } - G. De Cubber and D. Doroftei, “Resource Optimisation for Distributed Teams of Manned Aircraft and Drones," in 2025 11th International Conference on Control, Automation and Robotics, ICCAR 2025, 2025, p. 554–559.
[BibTeX] [Abstract] [Download PDF] [DOI]
With the significant increase in onboard computing capabilities, modern aerial robotic systems, can execute a broad range of perception and control algorithms simultaneously. Moreover, more and more, they are also deployed as heterogeneous collaborative teams, where manned and unmanned assets need to collaborate in a manned-unmanned teaming concept. This introduces the challenge of determining the optimal distribution of cognitive processes across aerial platforms, edge computing nodes, and cloud-based services. In this paper, we propose a novel load distribution methodology tailored to the aerial domain. The approach adopts a decentralized framework for allocating perception and control processes by evaluating communication parameters (e.g., bandwidth, latency, and cost), the computational capabilities of the drones and supporting infrastructure (including CPU, GPU, memory, and storage performance), and the real-time delivery requirements of high-quality output data. The proposed methodology is validated in a simulated environment, demonstrating promising performance and scalability in handling dynamic operational conditions.
@inproceedings{182aea17e9984dd395cb61aeec26ce48, title = "Resource Optimisation for Distributed Teams of Manned Aircraft and Drones", abstract = "With the significant increase in onboard computing capabilities, modern aerial robotic systems, can execute a broad range of perception and control algorithms simultaneously. Moreover, more and more, they are also deployed as heterogeneous collaborative teams, where manned and unmanned assets need to collaborate in a manned-unmanned teaming concept. This introduces the challenge of determining the optimal distribution of cognitive processes across aerial platforms, edge computing nodes, and cloud-based services. In this paper, we propose a novel load distribution methodology tailored to the aerial domain. The approach adopts a decentralized framework for allocating perception and control processes by evaluating communication parameters (e.g., bandwidth, latency, and cost), the computational capabilities of the drones and supporting infrastructure (including CPU, GPU, memory, and storage performance), and the real-time delivery requirements of high-quality output data. The proposed methodology is validated in a simulated environment, demonstrating promising performance and scalability in handling dynamic operational conditions.", keywords = "drones, mannedunmanned teaming, resource optimisation", author = "De Cubber, Geert and Doroftei, Daniela", note = "Publisher Copyright: {textcopyright} 2025 IEEE.; 11th International Conference on Control, Automation and Robotics, ICCAR 2025 ; Conference date: 18-04-2025 Through 20-04-2025", year = "2025", doi = "10.1109/ICCAR64901.2025.11072934", language = "English", pages = "554--559", booktitle = "2025 11th International Conference on Control, Automation and Robotics, ICCAR 2025", publisher = "Institute of Electrical and Electronics Engineers Inc.", edition = "2025", url = "https://ieeexplore.ieee.org/document/11072934", unit= meca-ras, project= {COURAGEOUS2,HADRON,ALPHONSE} }
2024
- A. M. Casado Fauli, M. Malizia, K. Hasselmann, E. Le Flécher, G. De Cubber, and B. Lauwens, “HADRON: Human-friendly Control and Artificial Intelligence for Military Drone Operations," in In Proceedings 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024, 2024.
[BibTeX] [Download PDF]@inproceedings{fauli2024hadronhumanfriendlycontrolartificial, title={HADRON: Human-friendly Control and Artificial Intelligence for Military Drone Operations}, author={Casado Fauli, Ana Maria and Malizia, Mario and Hasselmann, Ken and Le Flécher, Emile and De Cubber, Geert and Lauwens, Ben}, year={2024}, booktitle={In Proceedings 33rd IEEE International Conference on Robot and Human Interactive Communication, IEEE RO-MAN 2024}, publisher = {IEEE}, location = {Pasadena, USA}, unit= {meca-ras}, project= {HADRON}, eprint={2408.07063}, archivePrefix={arXiv}, primaryClass={cs.RO}, url={https://arxiv.org/abs/2408.07063}, }