
In collaboration with

- Loading Mastodon feed...
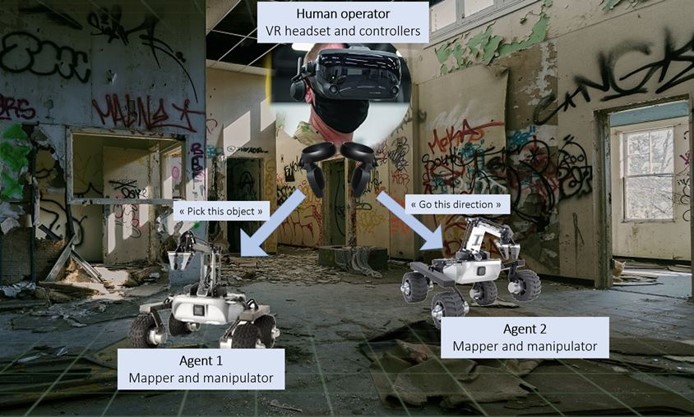
Autonomous robots are being deployed in more and more complex environments (notably with the advent of legged robots). This study is aimed at improving the execution of reconnaissance and mapping operations with a proof-of-concept system consisting of multiple unmanned ground robots with robotic arms that allow basic manipulations in the environment and a VR command console.
The work consists in integrating the robot platforms, the robotic arms and VR technology in an ensemble system for shared situational awareness that is as accurate, efficient and user-friendly as possible.
Royal Higher Institute for Defence
2023 – 2027
0,8 M€

Project Publications
2025
- M. Malizia, K. Hasselmann, A. Miuccio, R. Haelterman, N. Tsiogkas, and E. Demeester, “PFM-1 Landmine Detection in Vegetation Using Thermal Imaging with Limited Training Data," in 2025 25th International Conference on Control, Automation and Systems (ICCAS), 2025, pp. 1864-1869.
[BibTeX] [Download PDF] [DOI]@inproceedings{malizia2025pfm, author = {Malizia, Mario and Hasselmann, Ken and Miuccio, Alessandra and Haelterman, Rob and Tsiogkas, Nikolaos and Demeester, Eric}, title = {{PFM}-1 Landmine Detection in Vegetation Using Thermal Imaging with Limited Training Data}, booktitle = {2025 25th International Conference on Control, Automation and Systems (ICCAS)}, year = {2025}, pages={1864-1869}, unit= {meca-ras}, url={https://ras.papercept.net/conferences/conferences/ICCAS25/program/ICCAS25_ContentListWeb_4.html}, doi={10.23919/ICCAS66577.2025.11301116}, project= {BELGIAN, DREAM} } - A. Miuccio, T. Fréville, E. Le Flécher, and C. Hamesse, Autonomous Mobile Manipulation for Safe and Efficient Landmine DisposalCEIA Humanitarian Clearance Teamwork, 2025.
[BibTeX] [Abstract] [Download PDF]
Autonomous mobile manipulation for safe and efficient landmine disposal
@misc{miuccio_autonomous_2025, title = {Autonomous {Mobile} {Manipulation} for {Safe} and {Efficient} {Landmine} {Disposal}}, url = {https://www.ctro.hr/userfiles/files/BROSURA%20CTRO%20MINE%20ACTION_2025_za%20web.pdf#page=25}, abstract = {Autonomous mobile manipulation for safe and efficient landmine disposal}, language = {EN}, publisher = {CEIA Humanitarian Clearance Teamwork}, author = {Miuccio, Alessandra and Fréville, Timothée and Le Flécher, Emile and Hamesse, Charles}, year = {2025}, unit= {meca-ras}, project= {DREAM} }
2024
- C. Hamesse, T. ‘e, J. Saarinen, M. Vlaminck, H. Luong, and R. Haelterman, “Development of Ultra-Portable 3D Mapping Systems for Emergency Services," in IEEE ICRA Workshop on Field Robotics, 2024.
[BibTeX] [Abstract] [DOI]
Miniaturization of cameras and LiDAR sensors has enabled the development of wearable 3D mapping systems for emergency responders. These systems have the potential to revolutionize response capabilities by providing real-time, high-fidelity maps of dynamic and hazardous environments. We present our recent efforts towards the development of such ultra-portable 3D mapping systems. We review four different sensor configurations, either helmet-mounted or body-worn, with two different mapping algorithms that were implemented and evaluated during field trials. The paper discusses the experimental results with the aim to stimulate further discussion within the portable 3D mapping research community.
@inproceedings{93e1e7b40c664f7fa853b8853463fdac, title = "Development of Ultra-Portable 3D Mapping Systems for Emergency Services", abstract = "Miniaturization of cameras and LiDAR sensors has enabled the development of wearable 3D mapping systems for emergency responders. These systems have the potential to revolutionize response capabilities by providing real-time, high-fidelity maps of dynamic and hazardous environments. We present our recent efforts towards the development of such ultra-portable 3D mapping systems. We review four different sensor configurations, either helmet-mounted or body-worn, with two different mapping algorithms that were implemented and evaluated during field trials. The paper discusses the experimental results with the aim to stimulate further discussion within the portable 3D mapping research community. ", keywords = "SLAM, 3D point cloud, 3D reconstruction, LiDAR", author = "Charles Hamesse and Timoth{'e}e Freville and Juha Saarinen and Michiel Vlaminck and Hiep Luong and Rob Haelterman", year = "2024", doi = "10.48550/arXiv.2405.03514", language = "English", booktitle = "IEEE ICRA Workshop on Field Robotics", unit= {mwmw, meca-ras}, project= {DREAM} }